
编辑 | 萝卜皮
动物对身体的控制十分精妙,因此能够做出各种各样的行为。然而,大脑如何实现这种控制仍不清楚。要加深我们的理解,就需要能够将控制原理与动物的神经活动结构联系起来的模型。
为了实现这一点,哈佛大学、谷歌 DeepMind 的研究人员构建了一个「虚拟啮齿动物」,使用人工神经网络在物理模拟器中驱动大鼠的生物力学仿真模型。
该团队使用深度强化学习来训练虚拟代理模仿自由活动的老鼠的行为,从而让研究人员能够将「真实老鼠记录的神经活动」与模仿其行为的「虚拟啮齿动物的网络活动」进行比较。
模型能够准确模仿真实老鼠的运动,这一重大成就有望增进科学家对大脑如何控制复杂协调运动的理解。
这成果即使是当前最先进的机器人都难以复制,而研究团队相信他们的发现可以大大提高未来机器人的灵活性。
该研究以「A virtual rodent predicts the structure of neural activity across behaviors」为题,于 2024 年 6 月 11 日发布在《Nature》。
人类和动物能够轻松高效地控制自己的身体,而工程系统很难模仿这种控制方式。这是计算模拟,运动神经科学的技术局限导致的。原因是,相对于因果产生复杂、自然运动的模型,运动系统中的神经活动很少有明确的解释。
与此类生成模型不同,神经科学家试图通过将相关大脑区域的神经活动与可测量的运动特征(例如不同身体部位的运动学和动力学)联系起来,推断运动系统功能。
然而,这种方法存在问题,因为物理定律内在地将运动特征关联起来,因此仅能描述行为而非生成行为。为解决这一问题,研究团队提出了一种新途径:使用虚拟动物模型与控制模型关联来推断计算原理。

图示:使用 MIMIC 比较行为范围内的生物控制和人工控制。(来源:论文)
研究团队开发了一款「虚拟啮齿动物」,其中一个人工神经网络(ANN)驱动着一个在物理模拟器中运作的、具有生物力学真实性的大鼠模型。
构建此系统时,需要在可处理性、表达能力和生物学现实性之间取得平衡。研究人员选择了能够重现老鼠行为并预测神经活动的最简单模型。
模型采用深度强化学习训练 ANN,实现逆动力学模型。输入为真实动物的未来运动参考轨迹和当前身体状态,输出为实现预期状态所需的动作。研究人员可以根据相关数据比较实际大鼠的神经活动与虚拟啮齿动物网络的活动。
这种方法有两个主要优势:一是模型是因果性的,可以物理再现感兴趣的行为,而不仅仅是描述它。二是将重点放在识别大脑区域实现的功能上,而不仅仅是信息流的描述。
「我们从构建『具身代理』的挑战中学到了很多东西:人工智能系统不仅要智能思考,还必须在复杂环境中将这种思考转化为实际行动。」谷歌 Deepmind 的 Matthew Botvinick 说,「在神经科学背景下采用同样的方法似乎有助于深入了解行为和大脑功能。」
结果显示,感觉运动纹状体和运动皮层中的神经活动被虚拟啮齿动物的网络活动更准确地预测,这与这两个区域实现逆动力学控制相一致。
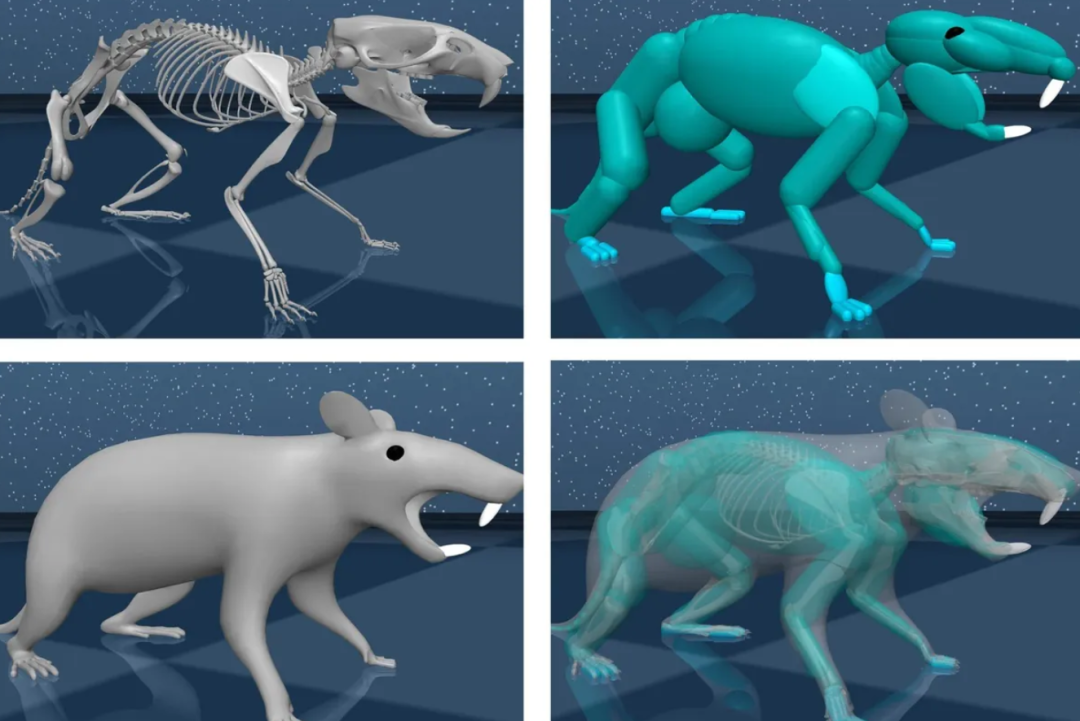
图示:虚拟老鼠。(来源:Deepmind 网站)
此外,网络的潜在变化预示了跨行为的神经变化结构,并以符合最优反馈控制的最小干预原则的方式赋予了系统稳健性。
这些发现揭示了通过物理模拟具有生物力学真实性的虚拟动物,可以有助于解释跨行为的神经活动结构,并将其与运动控制理论原则联系起来。
并且,这种方法展示了人工控制器操作生物力学模型以揭示神经电路计算原理的潜力。虚拟动物可以作为虚拟神经科学的平台,模拟实验难以推断的变量对神经活动和行为的影响。
这一研究领域对于开发先进的假肢和脑机接口至关重要。通过重建神经回路,这项研究获得的见解可能带来治疗运动障碍的新方法。此外,研究指出,虚拟大鼠为研究神经回路以及疾病对这些回路的影响提供了一个透明的模型。
接下来,研究人员计划让虚拟老鼠自主解决真实老鼠遇到的任务,进一步加深对大脑技能习得算法的理解。
未来,科学家可能会构建受大脑启发的网络架构,从而提高性能和可解释性,并探讨特定电路结构和神经机制在行为计算中的角色。
论文链接:https://www.nature.com/articles/s41586-024-07633-4
相关报道:https://decrypt.co/235086/virtual-rat-ai-brain-harvard-google-deepmind-robotics


